
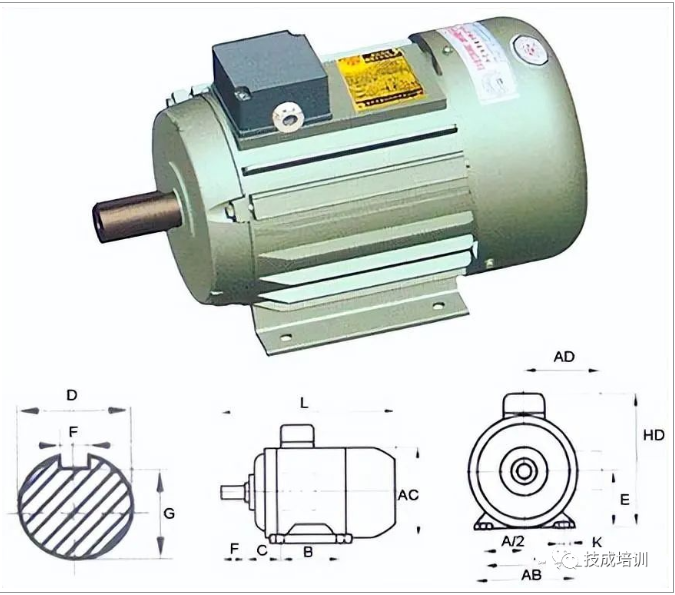
Một hệ thống không đồng bộ ba phađộng cơĐộng cơ không đồng bộ ba pha là loại động cơ cảm ứng được cấp điện bằng cách kết nối đồng thời với dòng điện xoay chiều ba pha 380V (độ lệch pha 120 độ). Do từ trường quay của rôto và stato của động cơ không đồng bộ ba pha quay cùng chiều và với tốc độ khác nhau nên có hệ số trượt, do đó nó được gọi là động cơ không đồng bộ ba pha.
Tốc độ quay của rôto trong động cơ không đồng bộ ba pha thấp hơn tốc độ quay của từ trường. Cuộn dây rôto tạo ra sức điện động và dòng điện do chuyển động tương đối với từ trường, và tương tác với từ trường để tạo ra mômen điện từ, thực hiện quá trình chuyển đổi năng lượng.
So với động cơ không đồng bộ một phađộng cơ, không đồng bộ ba phađộng cơCó hiệu suất hoạt động tốt hơn và có thể tiết kiệm nhiều loại vật liệu.
Theo cấu trúc rôto khác nhau, động cơ không đồng bộ ba pha có thể được chia thành loại lồng sóc và loại quấn dây.
Động cơ không đồng bộ rôto lồng sóc có cấu trúc đơn giản, hoạt động đáng tin cậy, trọng lượng nhẹ và giá thành thấp, được sử dụng rộng rãi. Nhược điểm chính của nó là khó điều chỉnh tốc độ.
Rôto và stato của động cơ không đồng bộ ba pha có cuộn dây cũng được trang bị cuộn dây ba pha và được nối với một biến trở ngoài thông qua vòng trượt và chổi than. Điều chỉnh điện trở của biến trở có thể cải thiện hiệu suất khởi động của động cơ và điều chỉnh tốc độ của động cơ.
Nguyên lý hoạt động của động cơ không đồng bộ ba pha
Khi dòng điện xoay chiều ba pha đối xứng được cấp vào cuộn dây stato ba pha, một từ trường quay được tạo ra, quay theo chiều kim đồng hồ dọc theo không gian tròn bên trong của stato và rôto với tốc độ đồng bộ n1.
Vì từ trường quay với tốc độ n1, dây dẫn rôto ban đầu đứng yên, do đó dây dẫn rôto sẽ cắt từ trường quay stato để tạo ra sức điện động cảm ứng (hướng của sức điện động cảm ứng được xác định bằng quy tắc bàn tay phải).
Do hiện tượng ngắn mạch ở cả hai đầu dây dẫn rôto bởi vòng ngắn mạch, dưới tác dụng của sức điện động cảm ứng, dây dẫn rôto sẽ tạo ra dòng điện cảm ứng về cơ bản cùng chiều với sức điện động cảm ứng. Dây dẫn mang dòng điện của rôto chịu tác dụng của lực điện từ trong từ trường stato (chiều của lực được xác định bằng quy tắc bàn tay trái). Lực điện từ tạo ra mômen xoắn điện từ trên trục rôto, làm cho rôto quay theo chiều của từ trường quay.
Qua phân tích trên, có thể kết luận rằng nguyên lý hoạt động của động cơ điện như sau: khi cuộn dây stato ba pha của động cơ (mỗi cuộn có góc điện 120 độ) được cấp dòng điện xoay chiều đối xứng ba pha, một từ trường quay được tạo ra, từ trường này cắt cuộn dây rôto và tạo ra dòng điện cảm ứng trong cuộn dây rôto (cuộn dây rôto là một mạch kín). Dây dẫn rôto mang dòng điện sẽ tạo ra lực điện từ dưới tác dụng của từ trường quay stato, do đó, mômen điện từ được hình thành trên trục động cơ, làm cho động cơ quay cùng chiều với từ trường quay.
Sơ đồ đấu dây của động cơ không đồng bộ ba pha
Sơ đồ đấu dây cơ bản của động cơ không đồng bộ ba pha:
Sáu dây dẫn từ cuộn dây của động cơ không đồng bộ ba pha có thể được chia thành hai phương pháp đấu nối cơ bản: đấu nối tam giác (delta) và đấu nối sao (star).
Sáu dây = ba cuộn dây động cơ = ba đầu vào + ba đầu ra, sử dụng đồng hồ vạn năng để đo điện trở giữa các đầu vào và đầu ra của cùng một cuộn dây, tức là U1-U2, V1-V2, W1-W2.
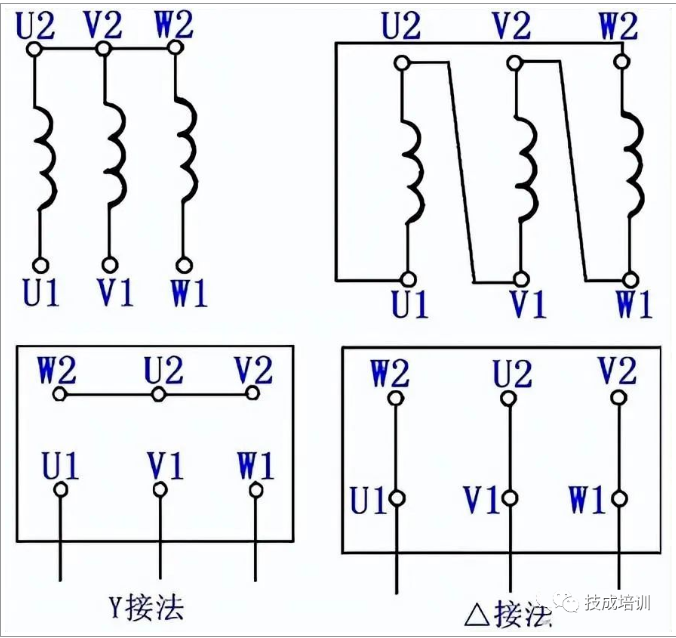
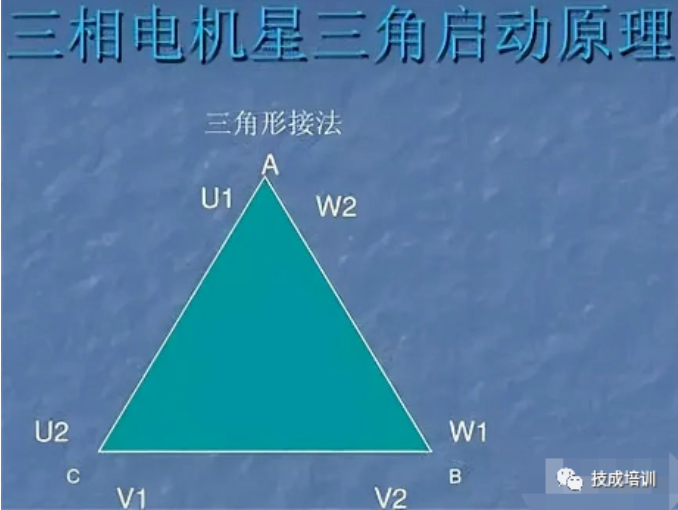
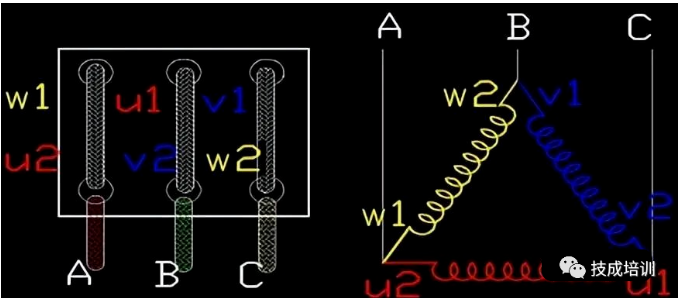
1. Phương pháp đấu nối tam giác delta cho động cơ không đồng bộ ba pha
Phương pháp đấu nối tam giác là nối đầu và đuôi của ba cuộn dây theo trình tự để tạo thành hình tam giác, như hình minh họa:
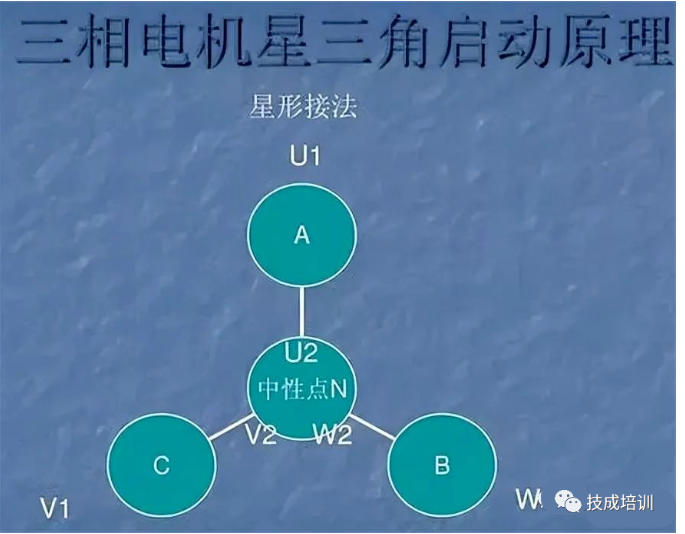
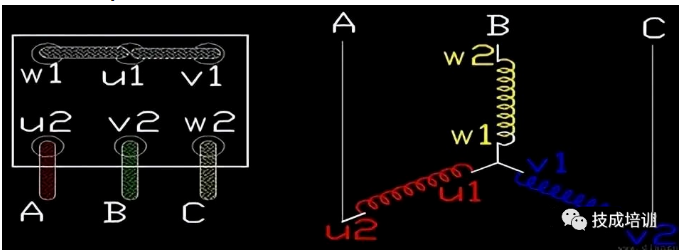
2. Phương pháp đấu nối hình sao cho động cơ không đồng bộ ba pha
Phương pháp đấu nối hình sao là nối đầu hoặc đuôi của ba cuộn dây, và ba dây còn lại được dùng làm dây dẫn nguồn. Phương pháp đấu nối được thể hiện trong hình vẽ:
Giải thích sơ đồ đấu dây của động cơ không đồng bộ ba pha bằng hình ảnh và văn bản.
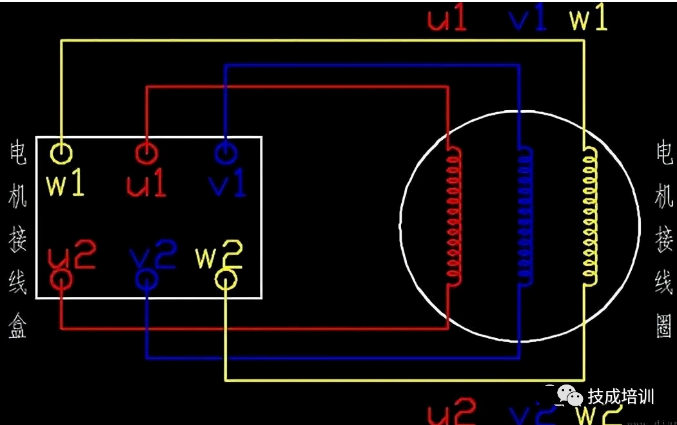
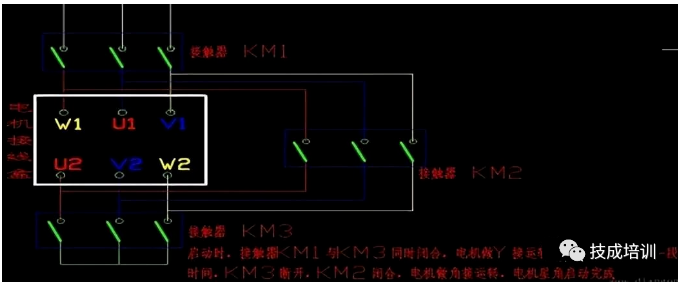
hộp đấu nối động cơ ba pha
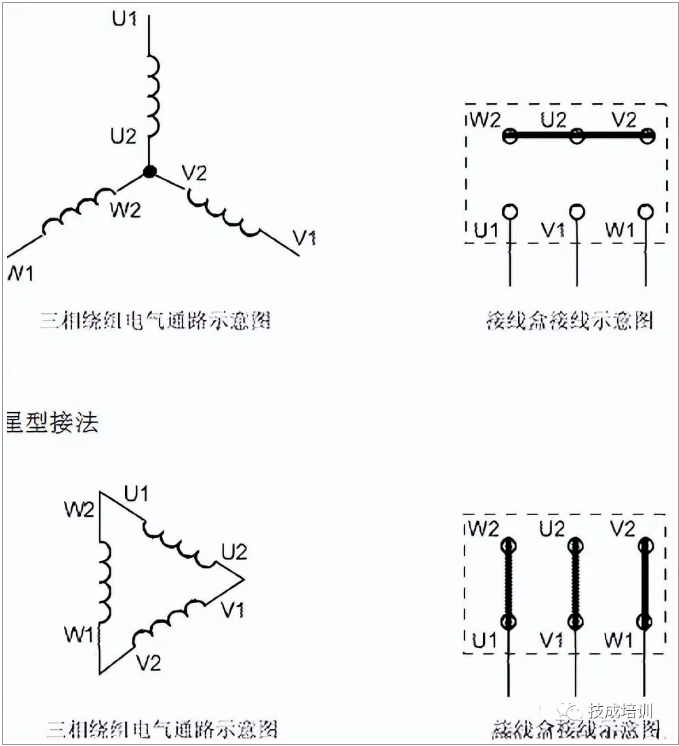
Khi đấu nối động cơ không đồng bộ ba pha, phương pháp đấu nối của bộ phận đấu nối trong hộp nối như sau:
Khi đấu nối góc cho động cơ không đồng bộ ba pha, phương pháp đấu nối của chi tiết nối hộp nối như sau:
Có hai phương pháp đấu nối cho động cơ không đồng bộ ba pha: đấu nối hình sao và đấu nối hình tam giác.
Phương pháp tam giác
Trong việc quấn cuộn dây với cùng điện áp và đường kính dây dẫn, phương pháp đấu nối hình sao có số vòng dây trên mỗi pha ít hơn ba lần (1,732 lần) và công suất thấp hơn ba lần so với phương pháp đấu nối hình tam giác. Phương pháp đấu nối của động cơ hoàn chỉnh đã được cố định để chịu được điện áp 380V và nhìn chung không thích hợp để sửa đổi.
Phương pháp đấu nối chỉ có thể thay đổi khi mức điện áp ba pha khác với mức điện áp chuẩn 380V. Ví dụ, khi mức điện áp ba pha là 220V, có thể thay đổi phương pháp đấu nối sao của điện áp ba pha ban đầu 380V thành phương pháp đấu nối tam giác; khi mức điện áp ba pha là 660V, phương pháp đấu nối tam giác của điện áp ba pha ban đầu 380V có thể được thay đổi thành phương pháp đấu nối sao mà công suất vẫn không thay đổi. Nói chung, động cơ công suất thấp được đấu nối sao, trong khi động cơ công suất cao được đấu nối tam giác.
Ở điện áp định mức, nên sử dụng động cơ đấu nối tam giác. Nếu chuyển sang đấu nối sao, nó thuộc loại động cơ hoạt động ở điện áp giảm, dẫn đến giảm công suất động cơ và dòng khởi động. Khi khởi động động cơ công suất cao (phương pháp đấu nối tam giác), dòng điện rất cao. Để giảm tác động của dòng khởi động lên lưới điện, người ta thường áp dụng phương pháp khởi động giảm áp. Một phương pháp là chuyển phương pháp đấu nối tam giác ban đầu sang phương pháp đấu nối sao để khởi động. Sau khi khởi động bằng phương pháp đấu nối sao, nó được chuyển trở lại phương pháp đấu nối tam giác để hoạt động.
Sơ đồ đấu dây của động cơ không đồng bộ ba pha
Sơ đồ vật lý của đường truyền tải thuận và nghịch cho động cơ không đồng bộ ba pha:
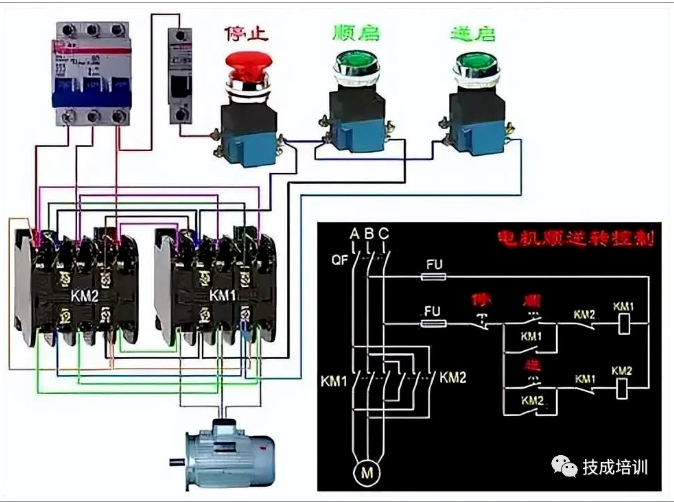
Để điều khiển động cơ quay thuận và nghịch, bất kỳ hai pha nào của nguồn điện đều có thể được điều chỉnh tương đối với nhau (gọi là chuyển mạch). Thông thường, pha V không thay đổi, còn pha U và pha W được điều chỉnh tương đối với nhau. Để đảm bảo trình tự pha của động cơ có thể được hoán đổi một cách đáng tin cậy khi hai công tắc tơ hoạt động, dây dẫn phải nhất quán ở cổng trên của công tắc tơ, và pha phải được điều chỉnh ở cổng dưới của công tắc tơ. Do việc hoán đổi trình tự pha của hai pha, cần phải đảm bảo rằng hai cuộn dây KM không thể được cấp điện cùng một lúc, nếu không có thể xảy ra lỗi ngắn mạch pha-pha nghiêm trọng. Do đó, cần phải sử dụng hệ thống khóa liên động.
Vì lý do an toàn, mạch điều khiển tiến và lùi liên động kép với khóa liên động bằng nút bấm (cơ khí) và khóa liên động bằng công tắc tơ (điện) thường được sử dụng; Bằng cách sử dụng khóa liên động bằng nút bấm, ngay cả khi nhấn đồng thời nút tiến và nút lùi, hai công tắc tơ dùng để điều chỉnh pha không thể được cấp điện đồng thời, tránh được hiện tượng ngắn mạch giữa các pha về mặt cơ học.
Ngoài ra, do sự liên kết của các công tắc tơ được sử dụng, miễn là một trong các công tắc tơ được cấp điện, tiếp điểm đóng lâu của nó sẽ không đóng lại. Bằng cách này, trong ứng dụng liên kết kép cơ khí và điện, hệ thống cấp điện cho động cơ không thể xảy ra hiện tượng ngắn mạch pha-pha, bảo vệ động cơ hiệu quả và tránh các sự cố do ngắn mạch pha-pha trong quá trình điều chỉnh pha, có thể gây cháy công tắc tơ.
Thời gian đăng bài: 07/08/2023


